想定用途
- 製造業ロボット自動化
- PoC検証環境構築
- AIロボット研究開発
- 次世代ロボット制御検証
― ROS2 × Physical AIによるロボット制御アーキテクチャー ―
シミュレーションから実機導入までを一貫して設計する
Sim-to-Realロボット制御システムの構成設計・実装を行っています。
デジタルツイン上でロボット制御を作り込み、そのまま安全に実機へ橋渡しするための開発アプローチです。 さらに、稼働後の調整や動作改善もシミュレーション環境から遠隔で検証・更新できます。
仮想空間で検証・最適化したロボット制御を、実機へ安全かつ高精度に移行する技術手法です。開発コストの削減と安全性の確保を同時に実現します。
シミュレーション環境上でロボット動作の検証を行うことで、実機試験の回数を減らし、開発サイクルを高速化できます。
物理ロボットを用いた試験を最小限に抑えることで、設備コストや試験工数を削減できます。
シミュレーション環境では危険を伴う動作や極端な条件下でのテストも安全に実施できます。
Sim-to-Real環境により、設計・検証・実装を一体化した開発プロセスを構築できます。
NVIDIA Isaac Simを活用することで、複数ロボットの同時挙動、フォトリアルな3D環境での動作検証、AIを活用した多様な動作パターンのシミュレーションなど、従来のロボットシミュレーションでは難しかった高度な検証を行うことが可能です。
製造現場の課題と
従来のロボット開発では、実機を用いた試験調整を繰り返す必要があり、開発コストや導入時間の増大、安全性の課題などが発生します。Sim-to-Realアプローチを導入することで、これらの課題を解決し、より効率的なロボット開発が可能になります。
01. 実機での検証試験
従来は実機を使った試験を繰り返す必要があり、開発初期段階から設備や調整の負担が大きくなります。
シミュレーション上で効率的な検証

仮想環境で制御ロジックの動作を検証することで、実機試験前に多くの問題を洗い出せます。
02. 試験の繰り返しでコスト増大
トライアンドエラーによる試験は、実機コストと工数を増大させ、開発全体を長期化させます。
開発コスト・期間の短縮

Sim-to-Real の流れを導入することで、開発初期の段階から高速に仮説検証できます。
03. 危険な動作試験のリスク
高速動作や衝突リスクを伴う試験は、実環境では安全確保のための制約が大きくなります。
安全な仮想環境での動作検証
危険を伴う条件や極端な状態も仮想環境上で試せるため、安全性を確保したまま精度を高められます。
04. 稼働後の調整は現地対応
ロボット導入後の動作調整やティーチング変更は、現地での作業が必要になることが多く、エンジニアの派遣や作業時間が発生します。
遠隔からの動作検証・更新
Sim-to-Real環境を活用することで、シミュレーション環境上で動作を検証しながら遠隔で制御調整やプログラム更新を行うことが可能になります。



モデル誤差、摩擦差分、センサ遅延など、シミュレーションと現実の差を特定します。
制御周期の不整合や通信ラグを前提とした、ロバストな制御系設計を行います。
Domain Randomization や誤差補正アルゴリズムの実装により、高精度な移行を実現します。
(Real Robot Validation Environment)
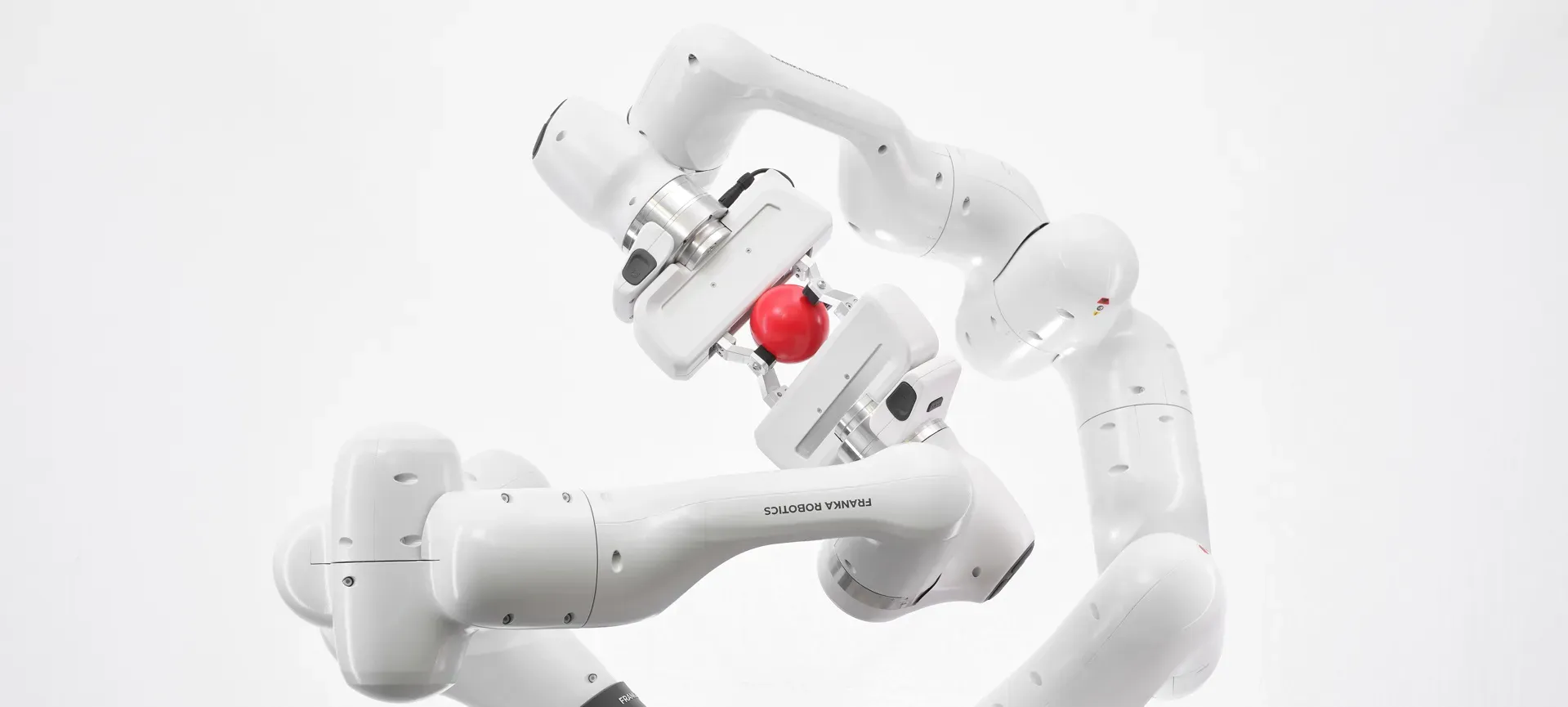
検証用の実機ロボットとして Franka Research 3 (FR3) を採用。
高度なトルク制御と Isaac Sim のリアルタイム同期による検証環境を構築しています。
― ROS2基盤・Jetson連携・オフライン対応 ―

エッジ側には NVIDIA Jetsonシリーズを採用。用途に応じて以下を組み合わせ、制御要求・推論負荷・リアルタイム性に応じた最適構成を設計します。
制御基盤は ROS2 を中心に構成。
主な構成要素
特定メーカーに依存しない構成を採用し、拡張可能な分散アーキテクチャを構築します。

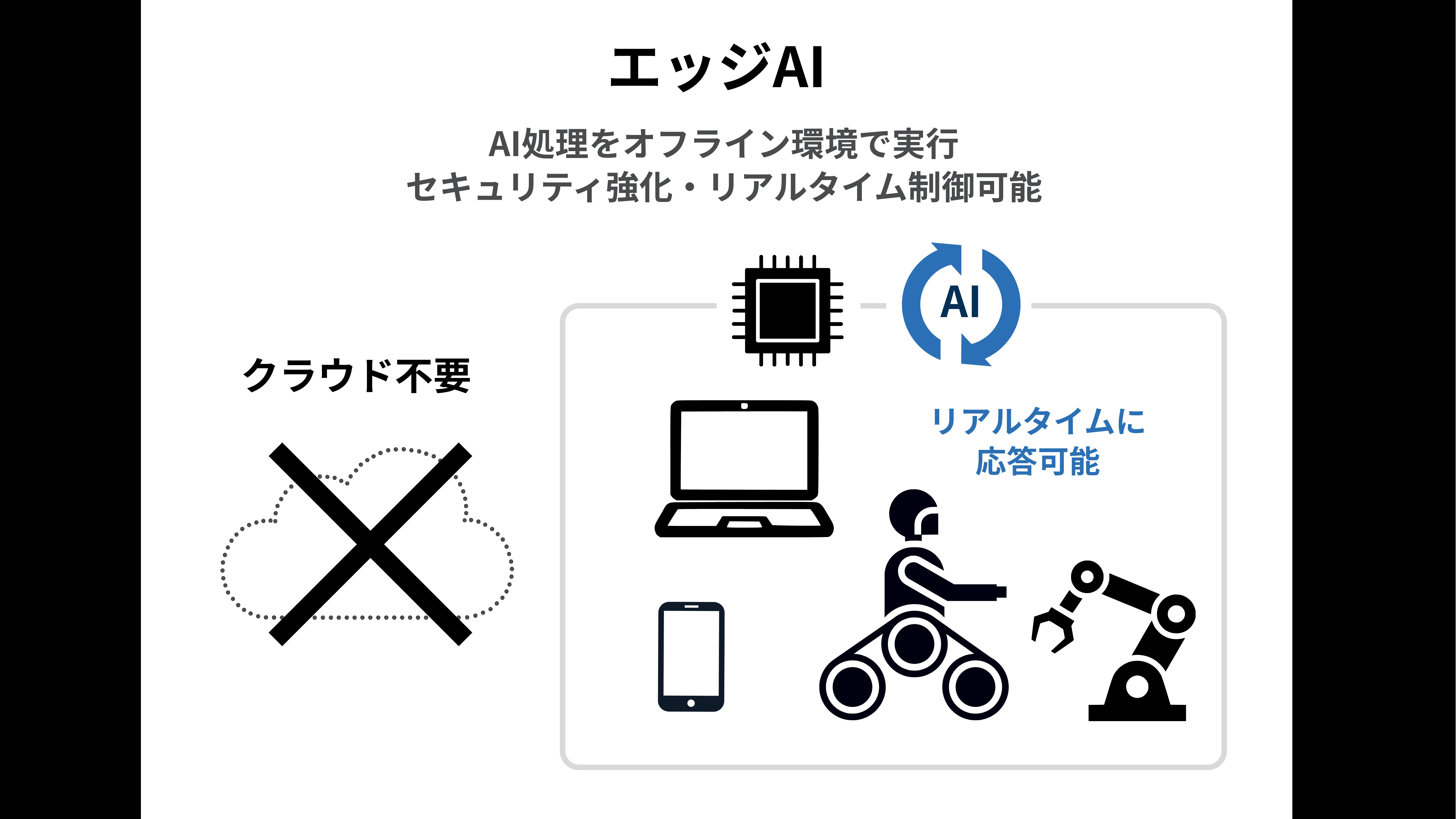
製造業・閉域ネットワーク環境向けに、以下を前提とした設計を行います。
エッジAIとリアルタイム制御を統合し、外部接続不要な制御構成にも対応可能です。
本プラットフォームは、ロボット制御・AI・シミュレーション技術を統合する以下の技術要素によって構成されています。

本構成は、単一メーカー・単一機種に依存しない設計思想を採用しています。ROS2を基盤とした分散制御アーキテクチャにより、異種ロボット・複数台構成・将来的な新形態ロボットへの拡張を前提としています。

協調搬送・双腕協調作業・工程分業型ロボットラインへの展開が可能です。


当社では、ロボット導入を単発のシステム構築ではなく、継続的な拡張と運用を前提としたロボットシステム基盤として捉えています。Sim-to-Realを中心に、シミュレーション・AI・実機制御を統合し、環境変化や用途拡張に対応可能なロボットソリューションの実装を目指しています。
Phase 1
ロボットアーム単体制御の高度化と誤差補正
Phase 2
複数台ロボットの協調制御検証
Phase 3
異機種ロボットの統合・分散制御
Phase 4
人型ロボットへのフィジカルAI適応